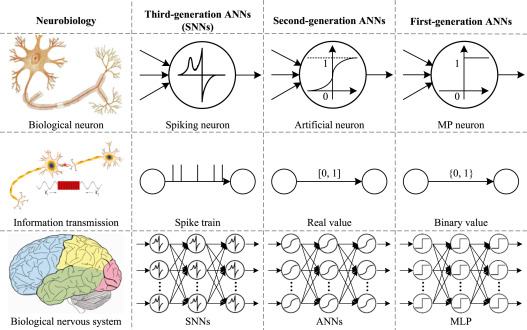
شبکههای عصبی اسپایکینگ (SNNs) شبکههای عصبی مصنوعی هستند که رفتار نورونهای بیولوژیکی را دقیقتر از شبکههای عصبی مصنوعی سنتی مدلسازی میکنند. در SNNs، اطلاعات با استفاده از اسپایک ها یا رویدادهای الکتریکی مختصر، مشابه نحوه ارتباط نورون ها در مغز، نمایش و پردازش می شود.
در یک SNN، هر نورون، ورودی را از نورون های دیگر دریافت می کند و این اطلاعات را با ادغام آن در طول زمان پردازش می کند. هنگامی که پتانسیل غشایی نورون به آستانه خاصی می رسد، یک اسپایک تولید می کند که به سایر نورون های شبکه منتقل می شود. زمان و الگوی این اسپایک ها حاوی اطلاعاتی در مورد ورودی دریافت شده توسط شبکه است.
SNNs به دلیل کاربردهای بالقوه آنها در تشخیص تصویر و گفتار، رباتیک و محاسبات نورومورفیک مورد مطالعه قرار گرفته اند. آنها به ویژه در کارهایی که نیاز به پردازش اطلاعات زمانی دارند، مانند پیشبینی سریهای زمانی، مفید هستند، زیرا به طور طبیعی میتوانند ماهیت متغیر ورودی را نشان دهند. با این حال، SNNs ها به طور کلی پیچیده تر و از نظر محاسباتی گران تر از شبکههای عصبی مصنوعی سنتی هستند. در نتیجه، این ویژگی آموزش و پیاده سازی آنها را دشوارتر می کند.
مقایسه شبکههای عصبی اسپایکینگ و شبکههای عصبی مصنوعی سنتی از نظر پیچیدگی
شبکههای عصبی اسپایکینگ به طور کلی پیچیدهتر از شبکههای عصبی مصنوعی سنتی (ANN) هستند. این به این دلیل است که SNNs رفتار نورونهای بیولوژیکی را دقیقتر مدلسازی میکنند. این کار شامل دینامیک پیچیدهتر از مدلهای ریاضی ساده است که معمولاً در شبکههای عصبی مصنوعی استفاده میشوند.
در یک SNN، هر نورون ورودی خود را در طول زمان یکپارچه میکند و اسپایکهایی تولید میکند که به نورونهای دیگر شبکه منتقل میشوند. این بدان معناست که رفتار یک SNN نه تنها تابعی از ورودی است که دریافت میکند، بلکه تابع زمان و الگوی اسپایکهای تولید شده توسط نورونها است. این امر تحلیل و درک SNNs را نسبت به ANNها که رفتار ورودی-خروجی ساده تری دارند، دشوارتر می کند.
علاوه بر این، آموزش SNNs می تواند چالش برانگیزتر از ANN ها باشد، زیرا دینامیک مبتنی بر اسپایک به الگوریتم های یادگیری تخصصی و تکنیک های آموزشی نیاز دارد. به عنوان مثال، پس انتشار، که به طور گسترده برای آموزش شبکه های عصبی مصنوعی استفاده می شود، به دلیل عدم تمایز مدل های عصبی مبتنی بر اسپایک، نمی تواند مستقیماً روی SNNs اعمال شود. در عوض، روشهای آموزشی جایگزین، مانند انعطافپذیری وابسته به زمان اسپایک (STDP) و رویکردهای مبتنی بر نرخ، پیشنهاد شدهاند.
علیرغم این چالشها، SNNs نتایج امیدوارکنندهای را در کاربردهای مختلف نشان دادهاند، بهویژه در کارهایی که نیاز به پردازش اطلاعات زمانی دارند، مانند پیشبینی سریهای زمانی و تشخیص رویداد. آنها همچنین برای استفاده در محاسبات نورومورفیک، که هدف آن توسعه سیستم های محاسباتی است که عملکرد مغز را تقلید می کند، مورد بررسی قرارگرفته اند.
آموزش و پیاده سازی SNNs
آموزش و پیادهسازی شبکههای عصبی اسپایکینگ (SNNs) به دلیل مدلهای عصبی مبتنی بر اسپایک و پویایی زمانی شبکه میتواند چالشبرانگیزتر از شبکههای عصبی مصنوعی سنتی باشد. در اینجا چند روش متداول برای آموزش و پیاده سازی SNNs را معرفی میکنیم.
۱- انعطاف پذیری وابسته به زمان اسپایک (STDP)
این قانون یادگیری با الهام از بیولوژیک، قدرت اتصالات بین نورون ها را بر اساس زمان نسبی اسپایک های آنها تغییر می دهد. در STDP، اتصالات بین نورون هایی که با هم شلیک می شوند، تقویت می شوند. در حالی که اتصالات بین نورون هایی که از هم جدا می شوند، ضعیف می شوند. STDP می تواند SNNs را با تنظیم وزن اتصال بین نورون ها آموزش دهد تا تفاوت بین خروجی شبکه و خروجی مورد نظر را به حداقل برساند.
۲- رویکردهای مبتنی بر سرعت
در رویکردهای مبتنی بر سرعت، اسپایکهای نورونها با نرخ شلیک پیوسته جایگزین میشوند که نمایشی هموار از فعالیت نورون در طول زمان است. این امکان استفاده از تکنیکهای بهینهسازی سنتی مانند انتشار پسانداز را برای آموزش شبکه فراهم میکند. با این حال، این رویکرد همچنین برخی از اطلاعات زمانی مهم را که اسپایکها نشان می دهند از دست می دهد.
۳- بهینه سازی مستقیم زمان اسپایک
در این رویکرد، زمانهای اسپایک نورونها مستقیماً بهینه میشوند تا اختلاف بین خروجی شبکه و خروجی مورد نظر به حداقل برسد. این کار را می توان با استفاده از تکنیک های بهینه سازی نزولی گرادیان انجام داد. اگرچه، می تواند از نظر محاسباتی گران باشد.
از نظر پیاده سازی، SNNs را می توان در سخت افزار یا نرم افزار پیاده سازی کرد. سخت افزار نورومورفیک، مانند تراشه های نورومورفیک، به دلیل موازی بودن و عملکرد رویداد محور، برای پیاده سازی کارآمد SNNs طراحی شده است. پیاده سازی نرم افزار SNNs را می توان با استفاده از کتابخانه ها و چارچوب های تخصصی مانند NEST، Brian و PyNN انجام داد که ابزارهایی برای ساخت و شبیه سازی SNNs ارائه می کنند.
به طور کلی، آموزش و پیاده سازی SNNs به دانش و تکنیک های تخصصی نیاز دارد. اما باید در نظر داشت که آنها مزایای بالقوه ای را در کارهایی که نیاز به پردازش اطلاعات زمانی دارند و همچنین در توسعه سیستم های محاسباتی نورومورفیک ارائه می دهند.
کاربردهای شبکههای عصبی اسپایکینگ
شبکههای عصبی اسپایکینگ (SNNs) به دلیل توانایی شان در نمایش طبیعت متغیر با زمان ورودی، نتایج امیدوارکننده ای را در برنامه های مختلف نشان داده اند. در ادامه به معرفی برخی از کاربردهای خاص SNNs میپردازیم.
۱- پیش بینی سری زمانی
پیشبینی سری زمانی یک کاربرد رایج شبکههای عصبی اسپایکینگ (SNNs) است که شامل پیشبینی مقادیر آینده یک متغیر وابسته به زمان بر اساس مقادیر گذشته آن است. در زمینه های مختلف مانند مالی، اقتصاد، پیش بینی آب و هوا و تشخیص گفتار استفاده می شود.
در کارهای پیش بینی سری زمانی، SNNs را می توان آموزش داد تا الگوها و روابط موجود در داده های سری زمانی را یاد بگیرند. و سپس از این دانش برای پیش بینی مقادیر آینده استفاده کنند. SNNs به طور طبیعی می توانند دینامیک زمانی ورودی را نشان دهند. همین ویژگی است که آنها را برای این نوع کارها مناسب می کند.
ورودی شبکههای عصبی SNNs برای پیشبینی سریهای زمانی معمولاً دنبالهای از مقادیر گذشته متغیر وابسته به زمان است. SNNs توالی ورودی را در طول زمان پردازش میکند و در پاسخ به ورودی، اسپایکهایی ایجاد میکند. زمان و الگوی این اسپایک ها حاوی اطلاعات مربوط به توالی ورودی است و برای تولید پیش بینی خروجی استفاده می شود.
معماریها و روشهای آموزشی مختلفی را میتوان برای پیشبینی سریهای زمانی با SNNs استفاده کرد، مانند شبکههای عصبی بازگشتی (RNN) و قوانین یادگیری انعطافپذیری وابسته به زمان اسپایک (STDP). RNN ها نوعی شبکه عصبی هستند که به طور طبیعی می توانند داده های متوالی را نشان دهند. این همان ویژگی است که آنها را برای کارهای پیش بینی سری زمانی مناسب می کند. قوانین یادگیری STDP قدرت اتصالات بین نورونها را بر اساس زمانبندی نسبی اسپایکهای آنها تغییر میدهد و به SNNs اجازه میدهد الگوهای زمانی در دادهها را بیاموزد.
۲- شناسایی رویداد
شناسایی رویداد یکی دیگر از کاربردهای شبکههای عصبی اسپایکینگ (SNNs) است که شامل شناسایی و طبقه بندی رویدادهایی است که در طول زمان رخ می دهند. در زمینه های مختلفی مانند نظارت تصویری، رباتیک و تشخیص گفتار استفاده می شود.
در وظایف تشخیص رویداد، SNNs را می توان آموزش داد تا الگوها و روابط در توالی رویدادها را بیاموزند و سپس از این دانش برای طبقه بندی توالی های جدید استفاده کنند.
ورودی SNNs برای تشخیص رویداد معمولاً دنباله ای از رویدادها است که در آن مجموعه ای از ویژگی ها هر رویداد را نشان می دهد. خروجی، برچسب کلاس پیشبینیشده برای توالی رویدادها است. SNNs توالی ورودی را در طول زمان پردازش میکند و در پاسخ به ورودی، اسپایکهایی ایجاد میکند. زمان و الگوی این اسپایکها حاوی اطلاعات مربوط به توالی ورودی است و برای تولید طبقه بندی خروجی استفاده می شود.
معماریها و روشهای آموزشی مختلفی را میتوان برای تشخیص رویداد با SNNs استفاده کرد، مانند شبکههای عصبی کانولوشنال (CNN) و قوانین یادگیری مبتنی بر اسپایک. CNN ها نوعی شبکه عصبی هستند که به طور طبیعی می توانند ویژگی های مکانی و زمانی را در ورودی نشان دهند. این ویژگی آنها را برای کارهای تشخیص رویداد که شامل داده های ویدئویی یا تصویری می شود، مناسب می کند. قوانین یادگیری مبتنی بر اسپایک، قدرت اتصالات بین نورونها را بر اساس زمانبندی اسپکهایشان تغییر میدهند و به SNNs اجازه میدهند الگوهای زمانی در دادهها را بیاموزند.
۳- رباتیک
شبکههای عصبی اسپایکینگ (SNNs) در رباتیک برای کارهای مختلف از جمله کنترل حرکت، گرفتن و دستکاری و جهت یابی هوشمند استفاده شده است. SNNs می توانند داده های حسگر را در زمان واقعی نمایش دهند. و دستورات موتور را در پاسخ به ورودی تولید کنند. و یک رویکرد الهام گرفته از بیولوژیکی برای کنترل وظایف در رباتیک ارائه دهند.
در کنترل حرکت، از SNNs می توان برای کنترل راه رفتن یک ربات، مانند ربات چهارپا یا دوپا استفاده کرد. SNNs می توانند داده های حسگر را از اندام های ربات پردازش کرده و دستورات موتوری را ایجاد کنند که منجر به حرکت هماهنگ می شود. دینامیک زمانی SNNs آنها را برای این نوع کار کنترلی مناسب می کند، زیرا می توانند الگوهای ریتمیک حرکت را به تصویر بکشند.
در گرفتن و دستکاری، SNNs می توانند حرکات بازوی رباتیک یا گیره را کنترل کنند. SNNs میتوانند دادههای حسگر را از یک شیء پردازش کنند و فرمانهای موتوری را تولید کنند که منجر به گرفتن پایدار یا دستکاری شیء میشود. توانایی SNNs برای نشان دادن ماهیت متغیر ورودی و گرفتن روابط زمانی بین نقاط داده، می تواند برای این نوع کار کنترلی مفید باشد.
در جهت یابی هوشمند، از SNNs می توان برای کنترل حرکات یک ربات در یک محیط پویا استفاده کرد. SNNs می توانند داده های حسگرها را از دوربین ها یا سایر حسگرها پردازش کرده و دستورات موتوری را تولید کنند که منجر به جهت یابی ایمن و کارآمد می شود. توانایی SNNs برای نشان دادن پویایی زمانی محیط می تواند برای این نوع کار کنترلی مفید باشد، زیرا می توانند تغییرات محیط را در طول زمان ثبت کنند.
۴- محاسبات نورومورفیک
محاسبات نورومورفیک زمینه ای از تحقیقات است که هدف آن توسعه سیستم های محاسباتی است که ساختار و عملکرد مغز را تقلید می کند. شبکههای عصبی اسپایکینگ (SNNs) جزء کلیدی محاسبات نورومورفیک هستند، زیرا برای مدلسازی رفتار نورونهای بیولوژیکی دقیقتر از شبکههای عصبی مصنوعی سنتی طراحی شدهاند.
هدف محاسبات نورومورفیک ایجاد سیستمهای محاسباتی بسیار کارآمد، هم از نظر مصرف انرژی و هم از نظر سرعت پردازش است. این تکنولوژی میتواند کارهایی را انجام دهد که برای سیستمهای محاسباتی سنتی دشوار است، مانند تشخیص الگو، کنترل بلادرنگ، و پردازش شناختی. محاسبات نورومورفیک را می توان در سخت افزار یا نرم افزار پیاده سازی کرد.
پیاده سازی سخت افزاری
پیاده سازی های سخت افزاری محاسبات نورومورفیک از تراشه های تخصصی مانند تراشه های نورومورفیک یا ممریستورها استفاده می کنند. این تراشه ها برای تقلید از رفتار نورون ها و سیناپس های بیولوژیکی طراحی شده اند. این تراشهها بسیار موازی هستند و با استفاده از پردازش رویداد محور کار میکنند، که از نظر بیولوژیکی واقعیتر از پردازش مبتنی بر ساعت مورد استفاده در محاسبات سنتی است. پیادهسازیهای سختافزاری محاسبات نورومورفیک میتوانند به پردازشهایی با سرعت بالا و کم توان دست یابند. این ویژگی آنها را برای کاربردهایی مانند رباتیک و وسایل نقلیه هوشمند مناسب میسازد.
پیاده سازی نرم افزاری
پیاده سازی های نرم افزاری محاسبات نورومورفیک از کتابخانه ها و چارچوب های تخصصی مانند NEST، برایان و PyNN برای شبیه سازی رفتار SNNs در سیستم های محاسباتی سنتی استفاده می کنند. از این شبیه سازی ها می توان برای مطالعه رفتار SNNs، توسعه الگوریتم های یادگیری جدید و آزمایش عملکرد SNNs در وظایف مختلف استفاده کرد.
به طور کلی، محاسبات نورومورفیک مزایای بالقوه ای را نسبت به سیستم های محاسباتی سنتی ارائه می دهد. به ویژه در کارهایی که نیاز به پردازش زمان واقعی، مصرف انرژی کم و پردازش شناختی دارند. با این حال، توسعه و پیادهسازی سیستمهای محاسباتی نورومورفیک هنوز در مراحل اولیه است و تحقیقات بیشتری برای تحقق کامل پتانسیل آن مورد نیاز است.
۵- رابط های مغز و کامپیوتر (BCI)
رابط های مغز و کامپیوتر (BCIs) به افراد اجازه می دهد تا با استفاده از سیگنال های مغزی دستگاه ها را کنترل کنند. شبکههای عصبی اسپایکینگ (SNNs) در BCI برای رمزگشایی سیگنالهای مغز در زمان واقعی و تولید دستورات برای دستگاه استفاده میشوند.
BCI ها از الکترودهایی برای اندازه گیری فعالیت الکتریکی در مغز استفاده می کنند که سپس توسط سیستم BCI پردازش می شود تا دستوراتی برای دستگاه تولید کند. SNNs می توانند سیگنال های مغز را در زمان واقعی رمزگشایی کنند. و بر اساس نیات کاربر دستورات دقیقی را برای دستگاه تولید کنند. SNNs می توانند دینامیک زمانی سیگنال های مغز را ضبط کنند که می تواند برای شناسایی اقدامات مورد نظر کاربر مفید باشد.
در BCI ها، SNNs را می توان برای کارهای مختلفی مانند کنترل اندام های مصنوعی، تایپ کردن روی کامپیوتر، یا حرکت روی صندلی چرخدار استفاده کرد. به عنوان مثال، SNNs می توانند برای رمزگشایی حرکات بازوی مورد نظر کاربر از سیگنال های مغزی و تولید دستوراتی برای کنترل حرکات بازوی مصنوعی استفاده شوند. SNNs همچنین می توانند حرف یا کلمه مورد نظر کاربر را از سیگنال های مغز رمزگشایی کرده و دستوراتی را برای تایپ در رایانه ایجاد کنند.
به طور کلی، BCI هایی که از SNNs استفاده می کنند، مزایای بالقوه ای را در ارائه کنترل بیشتر افراد دارای معلولیت یا آسیب بر محیط خود، بهبود کیفیت زندگی و استقلال آنها ارائه می دهند.